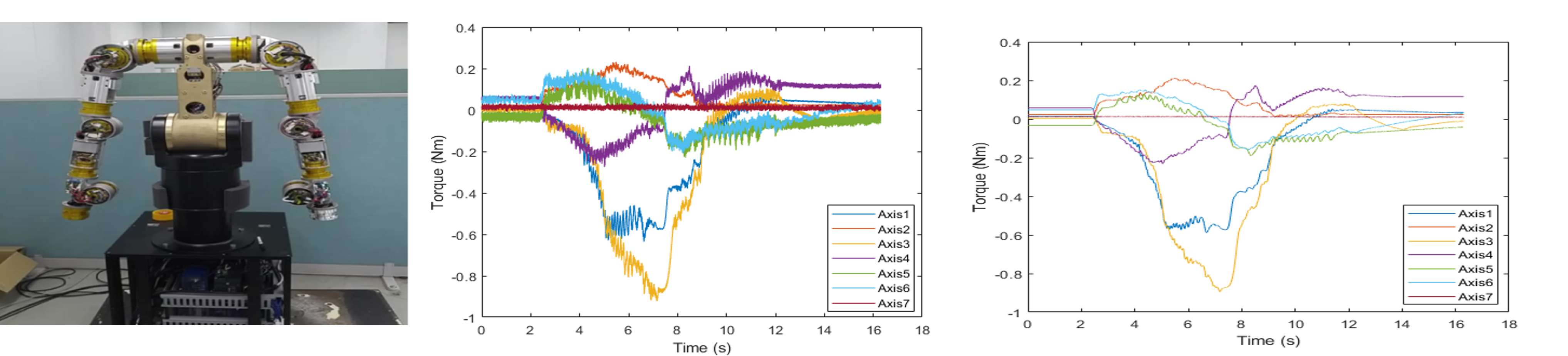
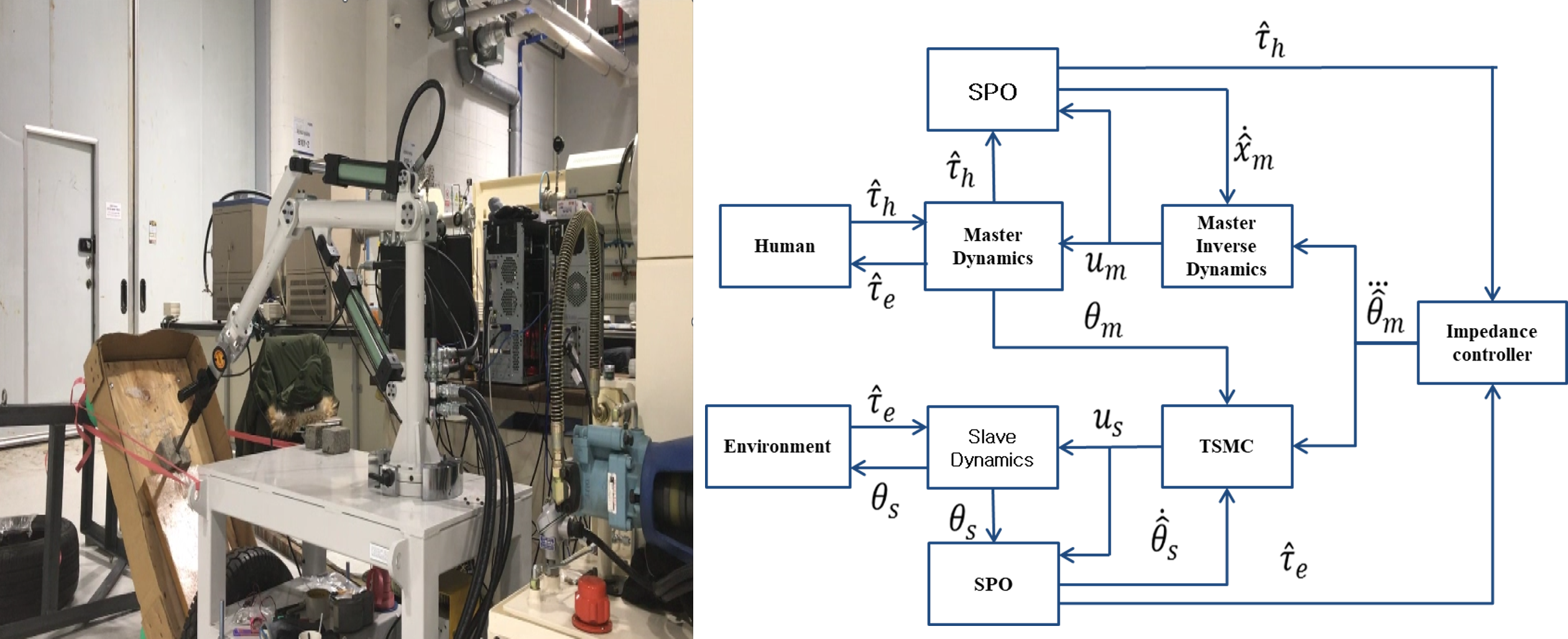
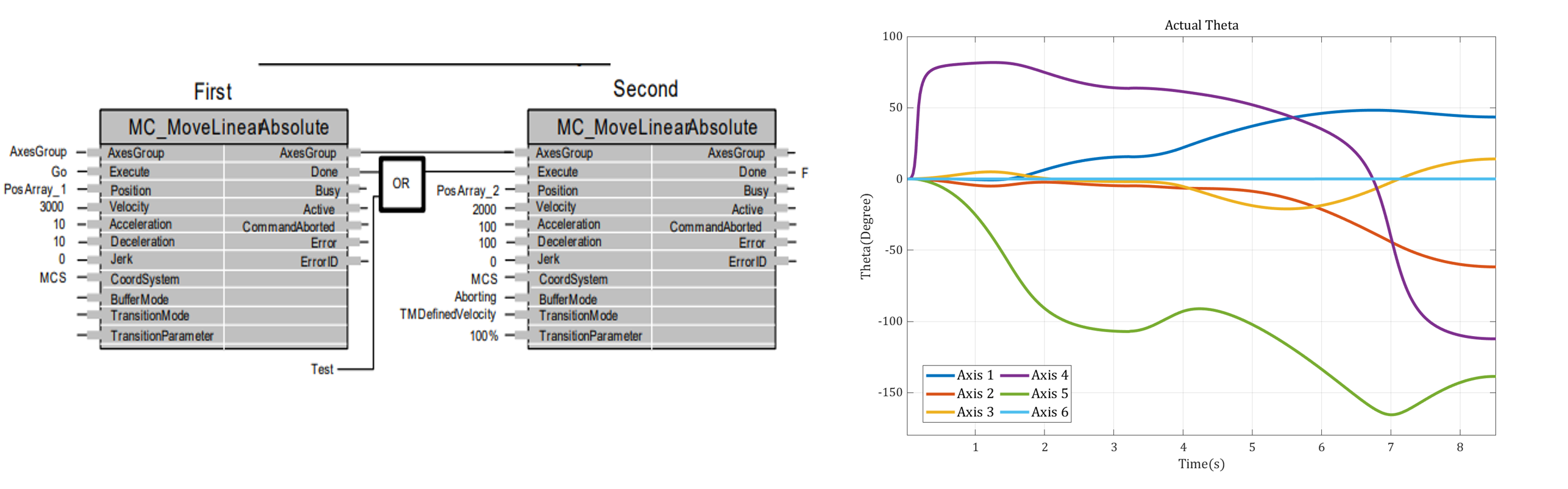
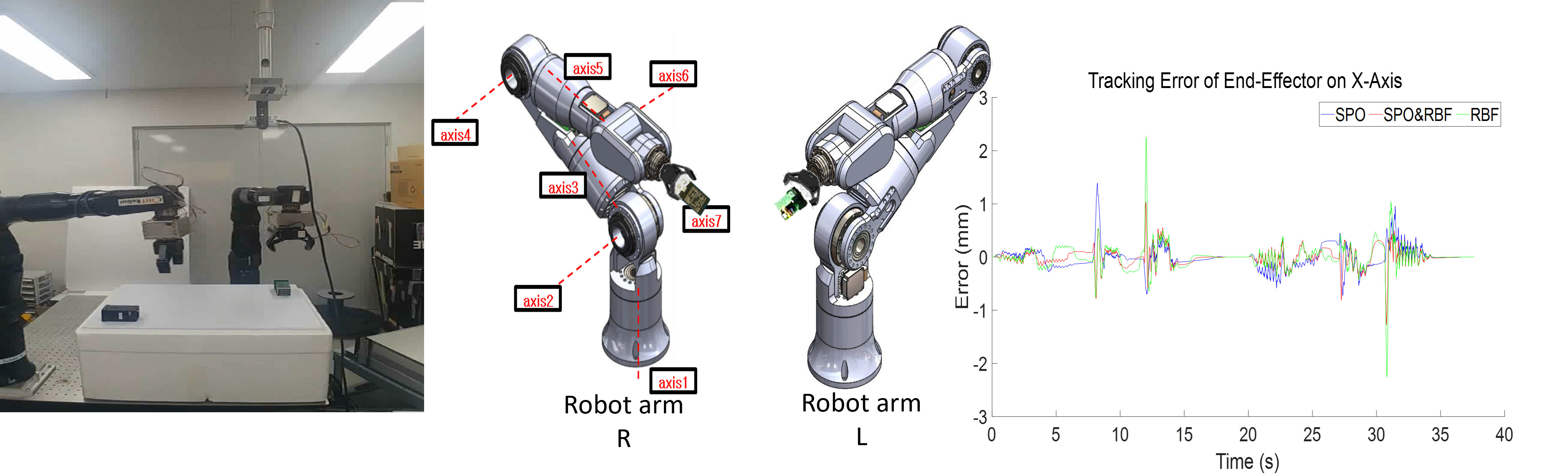
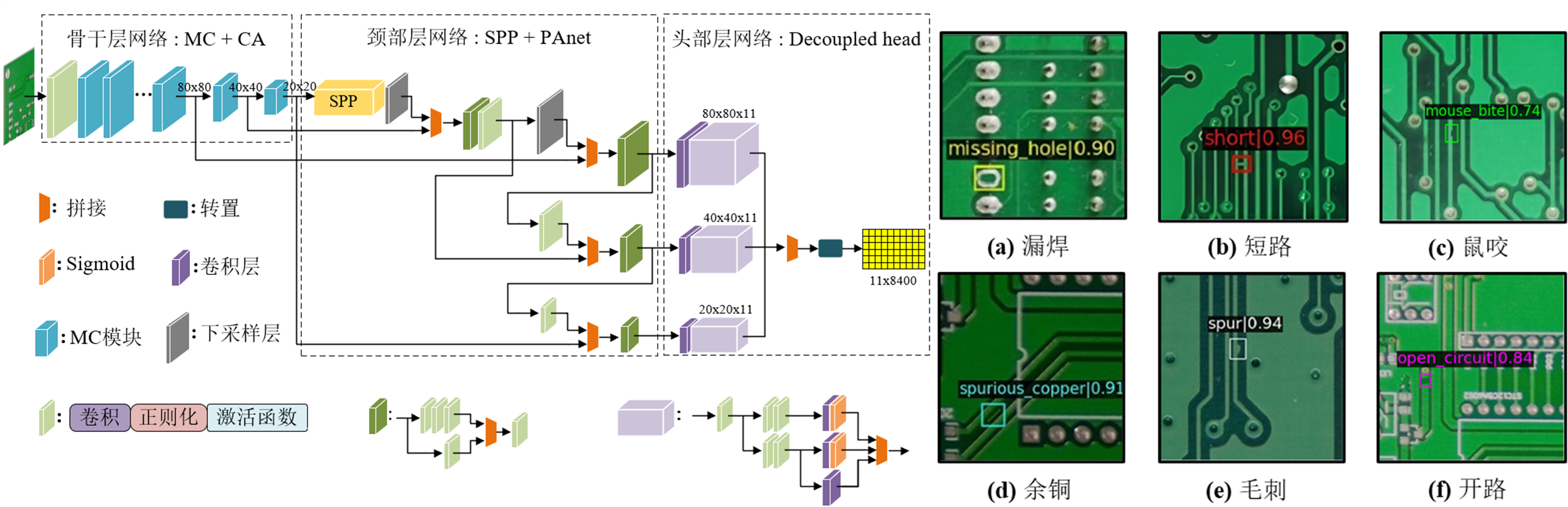
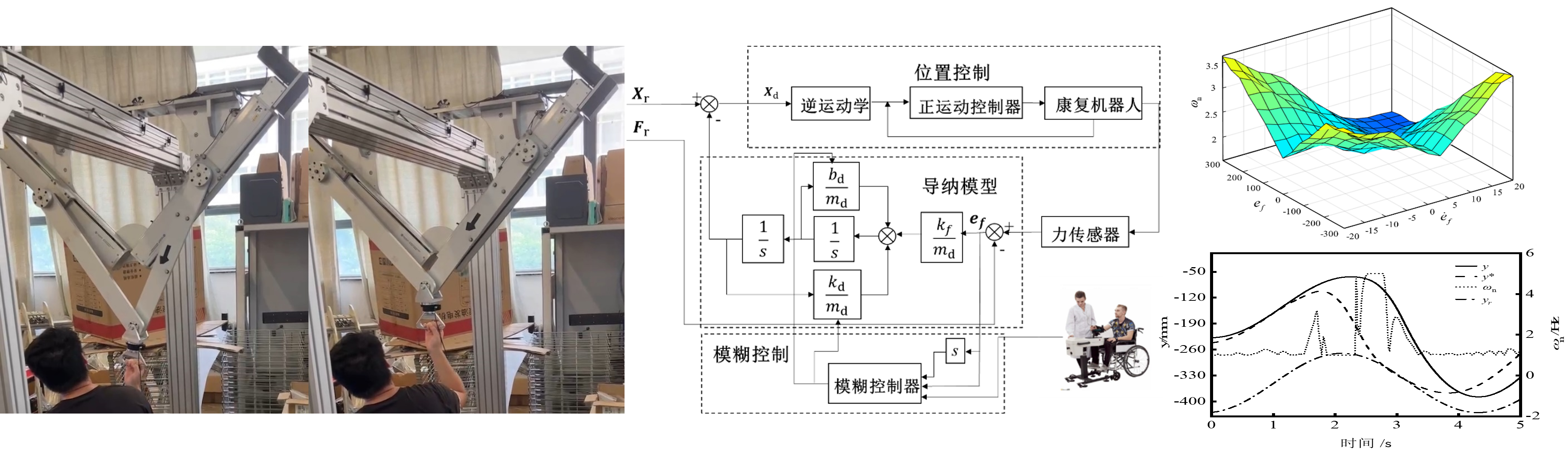
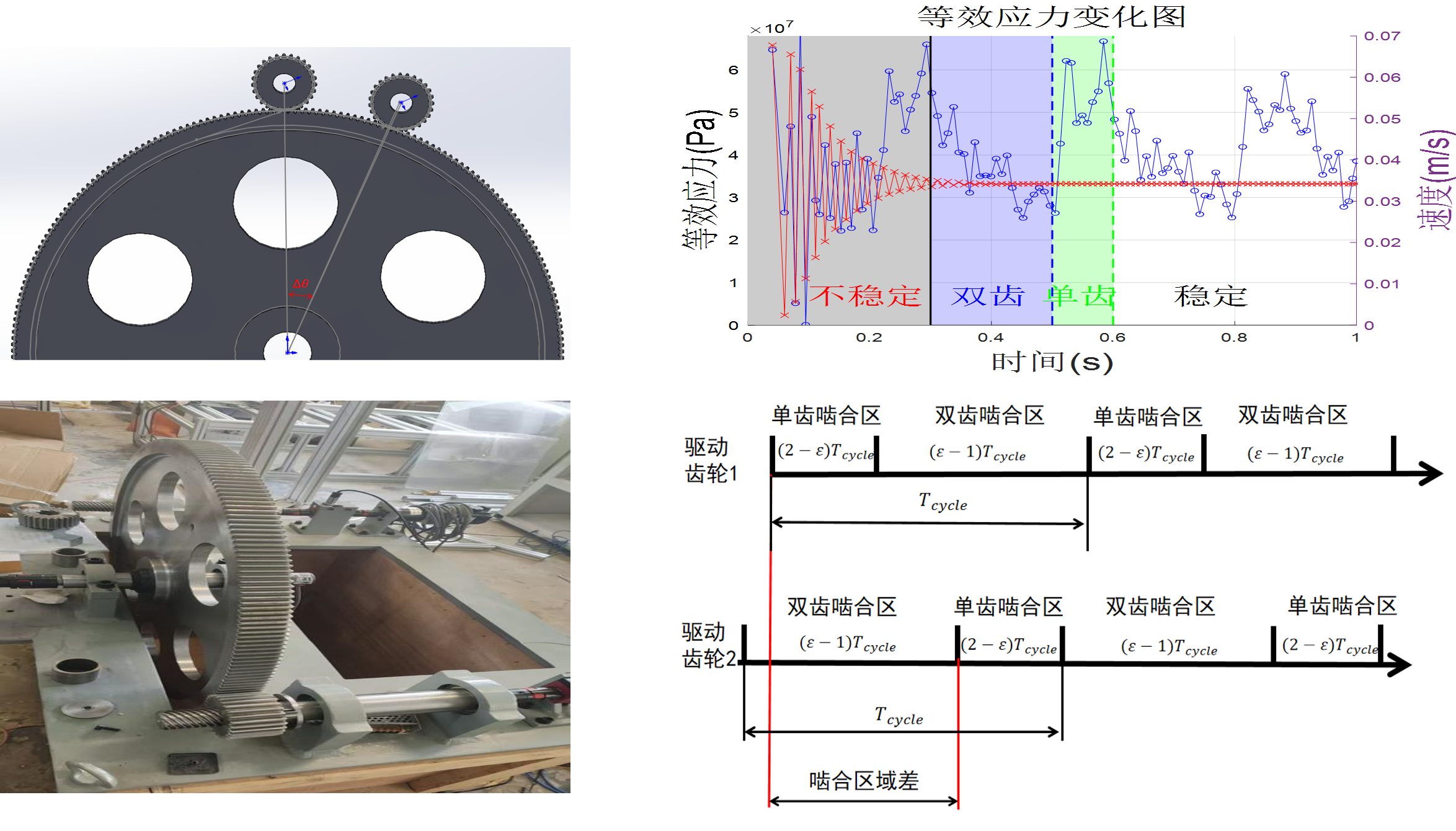
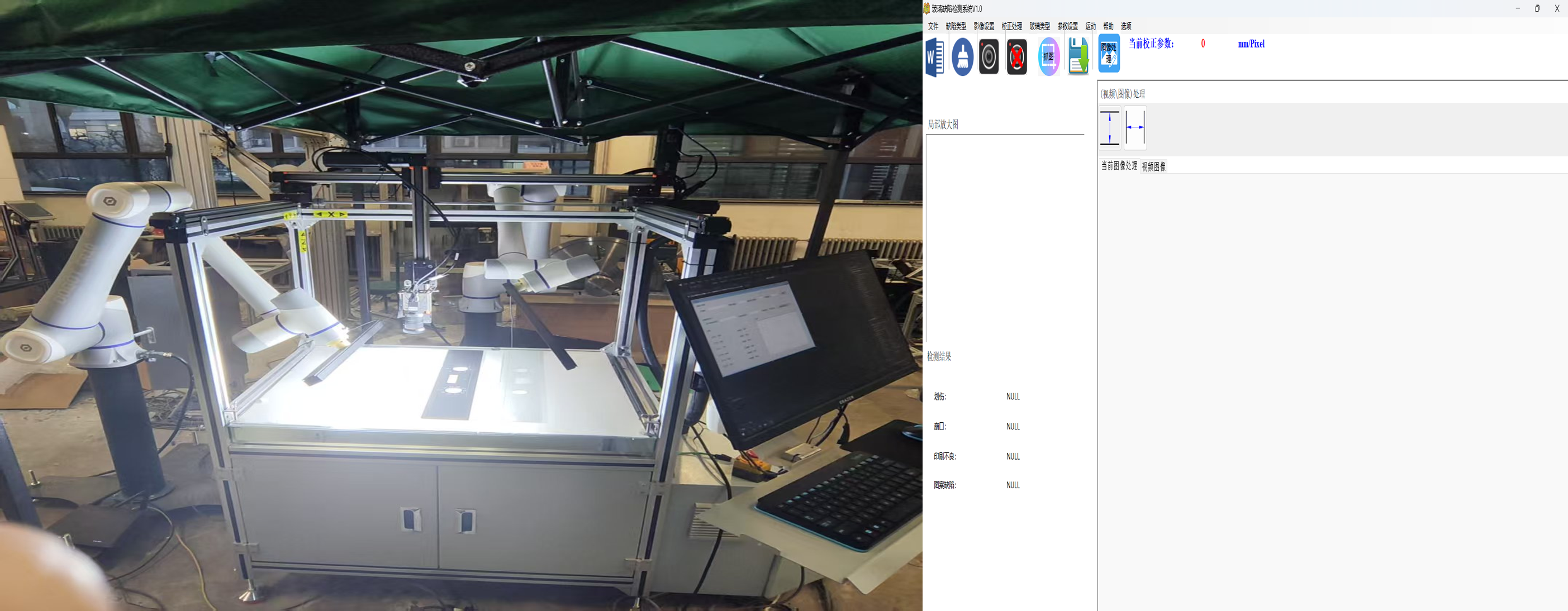
过往项目展示 机械臂的外力观测器设计 用于核电站远程拆除实感主从液压机械臂开发 基于PLCopen标准的机器人运动控制PLC运动程序开发 用于工业部件组装的双臂机械臂开发 基于YOLOX-MC-CA的PCB裸板表面缺陷检测及机器人分拣系统设计 上肢康复机器人柔顺控制研究 核电站鼓性滤网冗余双驱动功率分配策略控制 双臂打光直角机器人玻璃缺陷检测 Software Developer, Open Source Enthusiast and Life Adventurer FEATURED TAGS FRIENDS